New for 2026¶
Engineering never stops, and neither do we. At CTR Electronics, we are constantly analyzing and reflecting on our software, documentation and hardware integration. This past year, we’ve made immense investments in our differential stack, data analysis with Tuner, data logging and replay pipeline and much more. We are proud to present our new for 2026 changelog!
Firmware for the 2026 release of Phoenix 6 can be found by selecting “2026” in the firmware selection menu.
The API vendordep for 2026 is available under https://maven.ctr-electronics.com/release/com/ctre/phoenix6/latest/Phoenix6-frc2026-latest.json.
Users will need to update both firmware and API to make use of these features.
Note
This changelog is intended to highlight the major additions to the Phoenix 6 ecosystem. For a detailed list of changes and bug fixes, visit the API changelog.
API¶
Breaking Changes¶
The
new <Device>(int id, String canbus)constructors are now deprecated and will be removed in 2027. Use thenew <Device>(int id, CANBus canbus)constructors instead. This change is intended to prepare users for 2027, where an explicit CAN bus declaration is necessary.The minimum supported C++ version is now C++ 20, and the minimum Linux requirement is Ubuntu 22.04 / Debian Bookworm. Linux ARM32 is no longer supported.
C++: Improved robot project compilation times. This results in the following breaking changes: The
ctre/phoenix6/configs/Configs.hppheader has been split into separate files. In generated swerve projects,TunerConstants.hmust now explicitly include the motor controllers and encoder used.DifferentialMechanismandSimpleDifferentialMechanismhave been reworked to more closely align with the swerve API. The behavior of the difference axis has also been adjusted.
Signal Logger Improvements & Behavior Changes¶
Signal logger has had quite a few changes over the off-season. Signal Logger now has support for Protobuf and WPILib Structs, arbitrarily sized user signals, and annotation-based logging as an Epilogue Backend.
The behavior of the signal logger auto-start functionality has also been changed in response to user feedback to make the experience consistent between at-home testing and events. Signal Logging auto start is only enabled on the roboRIO 1 if a flash drive is present, and otherwise enabled by default on the roboRIO 2. Signal logging is started by any of the following (whichever occurs first):
It has been at least 1 second since program startup (allowing for calls to
setPath), and the robot is enabled.It has been at least 5 seconds since program startup (allowing for calls to
setPath), and the Driver Station is connected to the robot.
Additionally, OptimizeBusUtilization() now defaults to setting optimized signals to 4 Hz instead of 0 Hz, preserving data for hoot logs. Users can still get the old behavior by explicitly passing in 0 Hz.
Miscellaneous Changes
Logs from the same robot program instance / FRC match will now be grouped into a subdirectory named after the match and the date/time of the start of the match.
The list of Free Signals (including custom user signals) is no longer limited to WPILOG export and can now be exported to MCAP.
Hoot Replay Improvements¶
Hoot replay has been enhanced to simplify use cases beyond status signal playback. A HootAutoReplay API has been added to easily register custom “input” signals for logging on hardware and playback in replay. This also enables easy replay of the robot FPGA timestamp and joystick information.
private final Camera camera = new Camera(...);
private PoseEstimate cameraPoseEst = new PoseEstimate();
private final HootAutoReplay autoReplay = new HootAutoReplay()
.withTimestampReplay()
.withJoystickReplay()
.withStruct(
"CameraPoseEst/pose", Pose2d.struct,
/* getter lambda returns the value to log */
() -> cameraPoseEst.pose,
/* setter lambda applies the value from the log */
val -> cameraPoseEst.pose = val.value
)
.withDouble(
"CameraPoseEst/timestamp",
() -> cameraPoseEst.timestamp,
val -> cameraPoseEst.timestamp = val.value
);
private void fetchInputs() {
cameraPoseEst = camera.getPoseEstimate();
}
@Override
public void robotPeriodic() {
if (!Utils.isReplay()) {
fetchInputs();
}
autoReplay.update();
}
We highly recommend reading over the improved hoot replay documentation for understanding how to integrate hoot replay into your robot program.
Additionally, the Signal Logger is now supported in Hoot Replay with the following behavior:
Signal Logger is always enabled during replay. As a result,
SignalLogger::Start()andSignalLogger::Stop()are ignored.The replayed log will always be written to a
replay_<date>_<time>/subfolder next to the original log.All custom signals written during replay will be automatically placed under
hoot_replay/in the log.The replayed log also contains all status signals and custom signals from the original log, excluding those starting with
hoot_replay/.
This can be useful to log the new outputs after making changes to program logic.
Investments in Differential¶
Our differential API has seen a variety of changes and feature additions that should enhance and expand the capabilities of teams building differential systems (such as Differential Wrists or Elevators). SimpleDifferentialMechanism and DifferentialMechanism have been reworked to more closely align with swerve. Both APIs now take a DifferentialMotorConstants object on construction, internally construct and configure the motor controllers (with initial configs objects), and provide useful APIs such as getAveragePosition() and setPosition(avg, diff). Support has also been added for MotionMagicExpo and MotionMagicVelocity on the average axis.
Additionally, configs have been added to control the behavior of continuous wrapping and gear ratios on the difference axis. This also comes with a breaking change in behavior on the differential axis: the full differential output is now added/subtracted from each motor, and the difference axis uses half the difference in position/velocity between the two motors. This effectively means that PID gains do not change, but setpoints on the difference axis must be halved.
User documentation for the differential API can be found here. We highly recommend users read over the full changelog for a full list changes to the differential API.
Improvements to Swerve¶
Swerve has seen a number of enhancements. We’ve added a LinearPath API that generates a linear path between two poses with constant velocity and acceleration limits. A WheelForceCalculator has also been added that calculates the wheel force feedforwards to apply for the given target robot accelerations or change in ChassisSpeeds, based on the robot mass and MOI.
The generated swerve project has been updated to include a default “drive straight” autonomous command that slowly drives forward for 5 seconds.
Additionally, the SeedFieldCentric(Rotation2d) overload has been added to reset the heading of the robot to the given operator-perspective heading. The generated swerve project has also been updated to include a simple drive-straight auton and log to SignalLogger using the new WPILib Struct and Struct array support.
Additional Language Support for C#¶
C# has received some much needed updates that bring it to feature parity with the other supported languages. C# fits the middle-ground for users looking for type safety without using an unmanaged language like C++.
Check out the installation instructions on installing the nuget.
Additional Utility Functions¶
We’ve added a couple new utility functions, specifically for interacting with status signals.
Added
StatusSignal::IsNear(target, tolerance)utility function that checks whether the signal is near a target value given tolerance.Added
StatusSignalCollection, a lightweightList<BaseStatusSignal>wrapper that provideswaitForAll/refreshAll/etc. This can be used to easily register status signals from multiple classes for a singlerefreshAllcall.Java: Added
List<BaseStatusSignal>overloads towaitForAll/refreshAll/etc.C++: Replaced the
std::vectorandstd::arrayoverloads with astd::spanoverload for APIs such asWaitForAll/RefreshAll/OptimizeBusUtilization/etc.
Enhancements to Error Reporting¶
Some changes have been made to the API to improve error reporting.
StatusSignal
WaitForAll()andRefreshAll()now report errors for all the status signals involved that errored.StatusSignal
WaitForAll()andRefreshAll()now propagate anInvalidNetworkerror to all the provided status signals.
Talon FX Improvements¶
Improvements to follower have been made, specifically in regards to when the leader active request is Voltage-based.
Follower and DifferentialFollower now follow
MotorVoltageinstead ofDutyCyclewhen the leader is running a voltage control output type.Follower now follows the leader’s coast/brake.
Additionally, Dynamic Motion Magic® Expo control requests have been added. Furthermore, the GravityArmPositionOffset config has also been added to offset the position used for arm kG calculations (within (-0.25, 0.25) rot).
Miscellaneous Changes
Added support for simple gain scheduling in position PID closed-loop control based on closed-loop error. For more information, see the API documentation of
ClosedLoopGeneralConfigs::GainSchedErrorThreshold,ClosedLoopGeneralConfigs::GainSchedKpBehavior, andSlotConfigs::GainSchedBehavior.Added
MotionMagicAtTargetstatus signal, which returns whether the motion profile has completed (equivalent to checking thatMotionMagicIsRunning, theClosedLoopReferenceis the final target, and theClosedLoopReferenceSlopeis 0).
Kraken X44¶
Improvements to FOC have been made to improve peak performance.
Additionally, Kraken X44 simulation support has been added via TalonFXSimState::SetMotorType.
Talon FXS¶
Our non-FRC customers can now utilize generic sensored (with hall effects) BLDC motors up to 24V on Talon FXS. This enables use cases for industrial motors in automation. Take a look at the Custom Brushless Motor configs for more information on how to configure this.
Phoenix Tuner X¶
Tuner has seen a number of new feature additions, bug fixes, and general improvements.
Elevator Mechanism Support¶
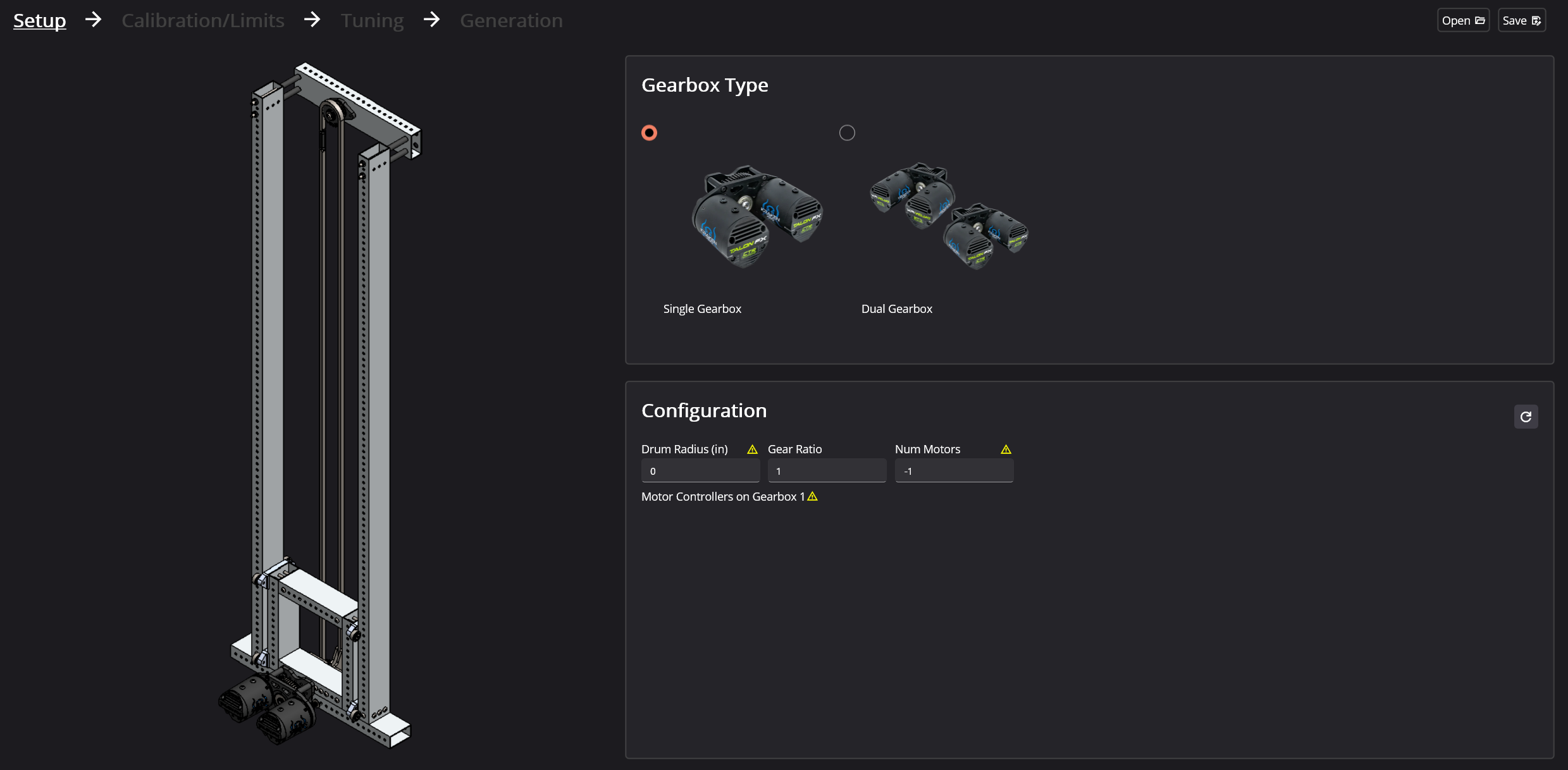
Under the Mechanisms page in Tuner X is the Elevator Generator. This utility guides the user through determining the necessary constants and configurations for a working Elevator subsystem. Take a read through the relevant documentation pages for information on how this works!
Multi-device Control & Plot¶
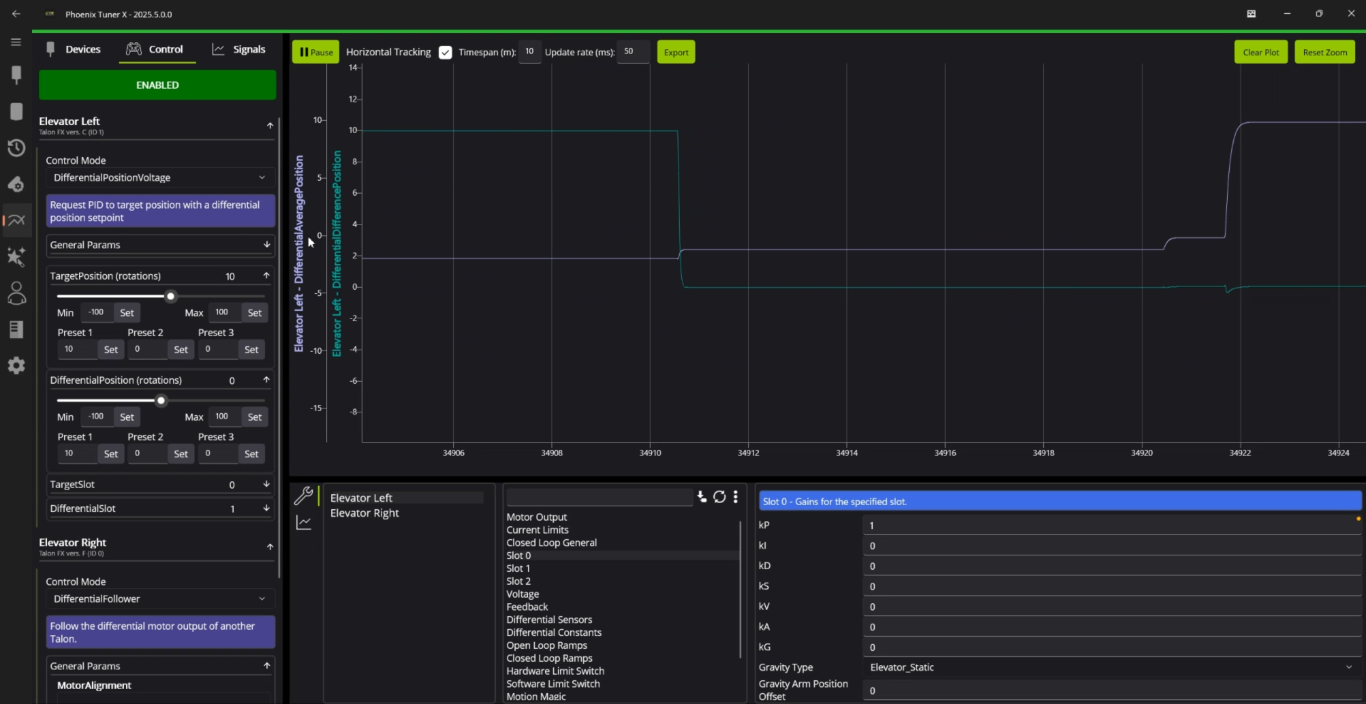
One of the most asked features of Phoenix Tuner has been the ability to control and plot multiple devices simultaneously. We are proud to announce that this feature will now be available for the 2026 season. This page can be found in the left-hand sidebar.
Integrated Log Analysis (Beta)¶
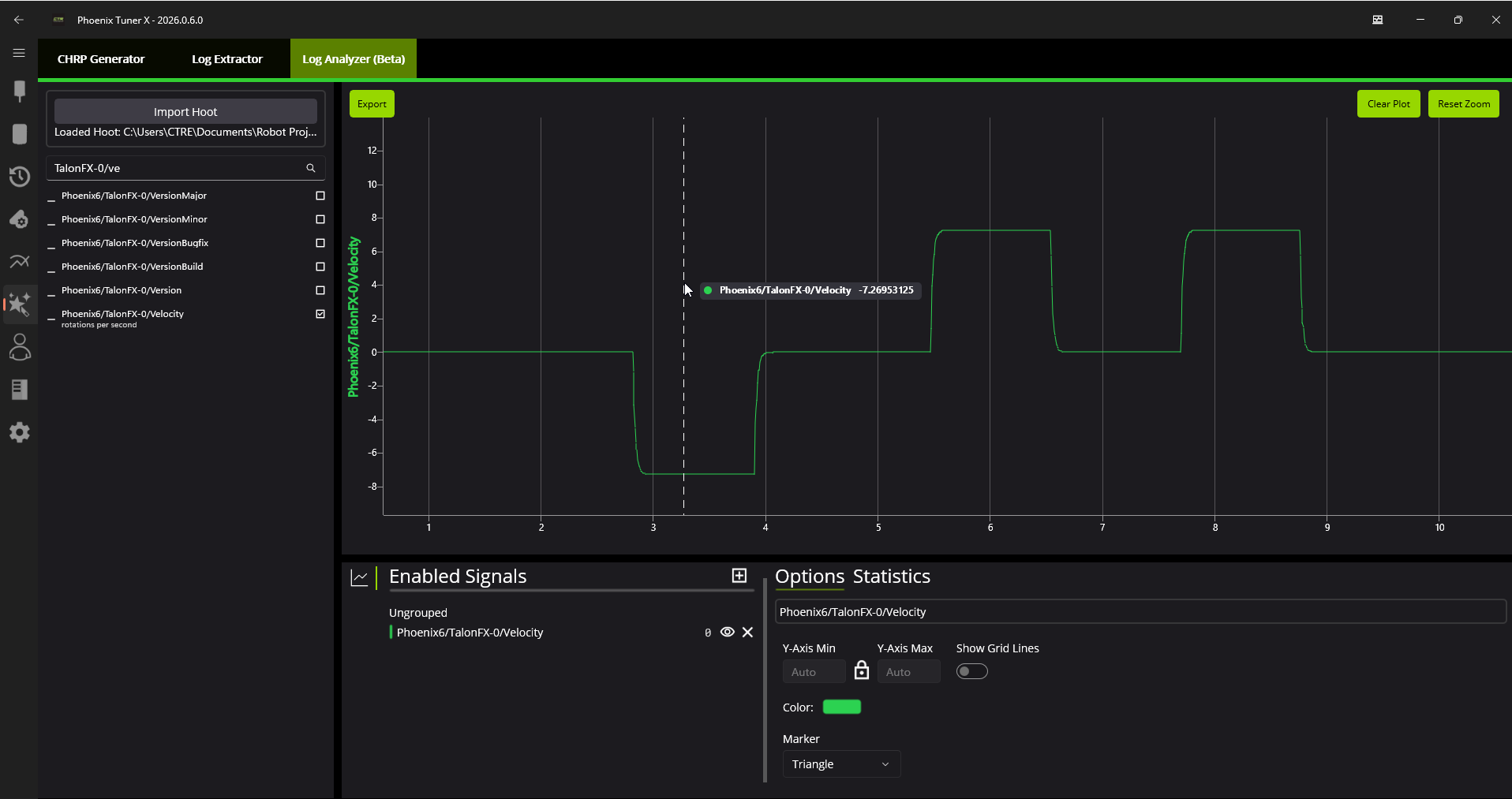
Hoot logs can now be directly plotted in Tuner. This feature is marked as beta as we continue to refine and improve the process. This page is available by going to Tools (magic wand in the sidebar) and then clicking on Log Analyzer (Beta).
Feedback is welcome and can be submitted by sending us an email!
CANdle Animations Preview¶
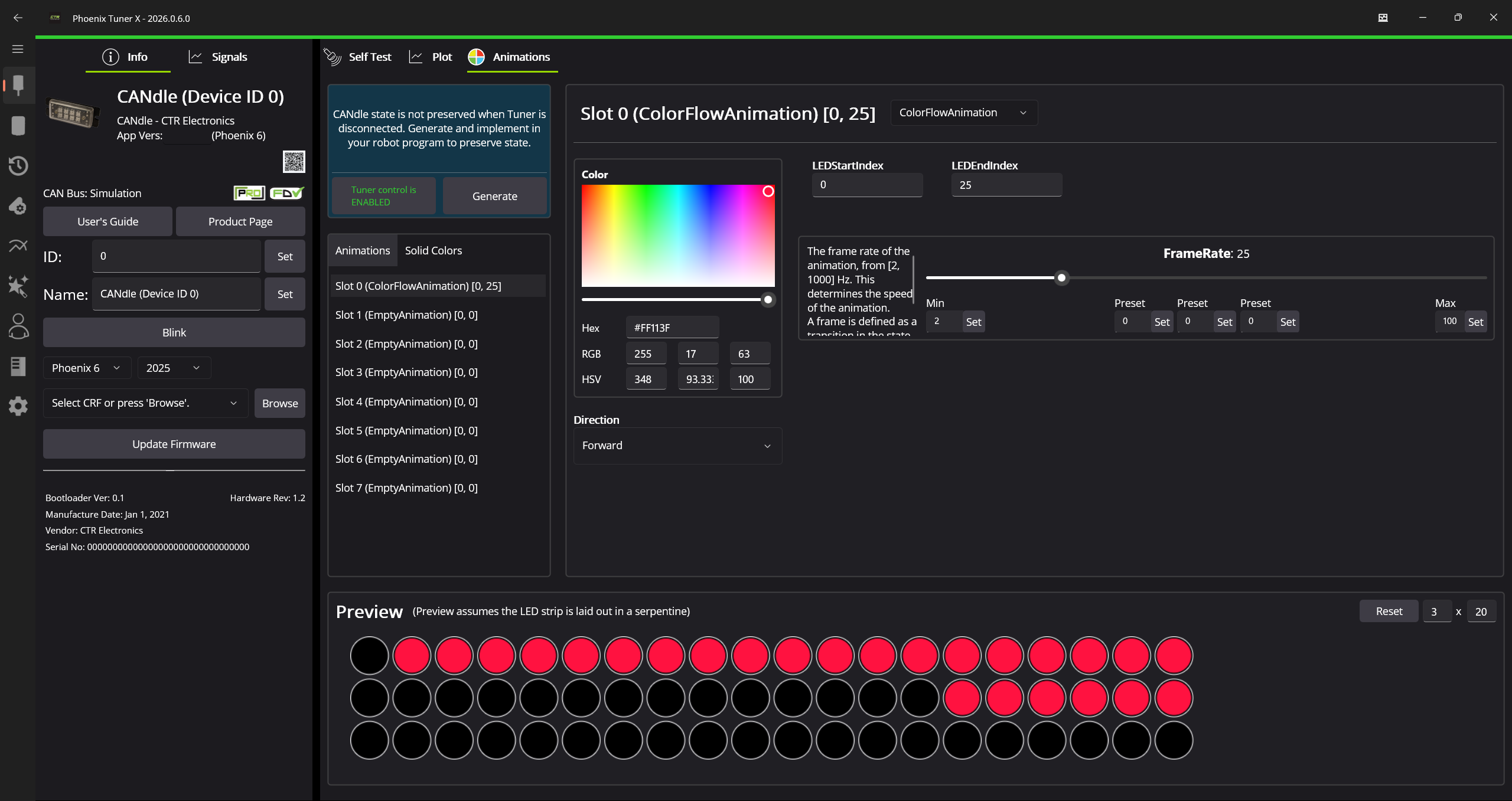
The traditional control interface has been replaced with a CANdle animations tab, directly in Tuner. This allows you to have a real-time preview of the state of your LED strip and also includes generation functionality. The built-in generator will take your current CANdle animations and solid colors, and create a subsystem that you can implement in your robot program.
Miscellaneous Improvements¶
Beyond the big ticket feature adds is loads of smaller enhancements throughout the application.
Reworked the flyout to be minimized by default and show a flat list of icons.
Reworked configs to be a nested menu. This improves the performance and makes it more reusable across the application.
Added support for extracting and deleting folders on the Hoot Extractor page.
Added batch licensing to device history.