Status Signals¶
Signals represent live data reported by a device; these can be yaw, position, etc. To make use of the live data, users need to know the value, timestamp, latency, units, and error condition of the data. Additionally, users may need to synchronize with fresh data to minimize latency.
Tip
A Signal Logging API is available for logging received signals. This can be useful for any form of post analysis, including diagnosing issues after a match or using WPILib SysId.
StatusSignal¶
The StatusSignal (Java, C++, Python) is a signal object that provides APIs to address all of the requirements listed above.
The device object provides getters for all available signals. Each getter returns a StatusSignal that is typed appropriately for the signal.
Note
The device getters return a cached StatusSignal. As a result, frequently calling the getter does not influence RAM performance.
// fetch with refresh
var supplyVoltageSignal = m_device.getSupplyVoltage();
// fetch WITHOUT refresh
var supplyVoltageSignal = m_device.getSupplyVoltage(false);
// fetch with refresh
auto& supplyVoltageSignal = m_device.GetSupplyVoltage();
// fetch WITHOUT refresh
auto& supplyVoltageSignal = m_device.GetSupplyVoltage(false);
# fetch with refresh
supply_voltage_signal = self.device.get_supply_voltage()
# fetch WITHOUT refresh
supply_voltage_signal = self.device.get_supply_voltage(False)
The value of the signal can be retrieved from the StatusSignal by calling getValue().
// get the value as a unit type
var supplyVoltage = supplyVoltageSignal.getValue();
// convert the unit type to our desired units
double supplyVoltageVolts = supplyVoltage.in(Volts);
// alternatively, get the value as a double in the documented canonical units
double supplyVoltage = supplyVoltageSignal.getValueAsDouble();
// get the value as a unit type
auto supplyVoltage = supplyVoltageSignal.GetValue();
// pull out the underlying value from the unit type
double supplyVoltageVolts = supplyVoltage.value();
// alternatively, get the value as a double in the documented canonical units
double supplyVoltage = supplyVoltageSignal.GetValueAsDouble();
supply_voltage = supply_voltage_signal.value
Note
Phoenix 6 utilizes the Java units library and C++ units library when applicable. Using the Java units library may increase GC overhead.
The StatusCode (Java, C++, Python) of the signal can be retrieved by calling getStatus(). This can be used to determine if the device is not present on the CAN bus.
Note
If a status signal is not available on the CAN bus, an error will be reported to the Driver Station.
Refreshing the Signal Value¶
The device StatusSignal getters implicitly refresh the cached signal values by default. However, if the user application caches the StatusSignal object or passes in false to the device signal getters, the refresh() method must be called to fetch fresh data. Multiple signals can be refreshed in one call using BaseStatusSignal.refreshAll() (Java, C++, Python), which can improve performance compared to individual refreshes.
Tip
The refresh() method can be method-chained. As a result, you can call refresh() and getValue() on one line.
// refresh the supply voltage signal
supplyVoltageSignal.refresh();
// refresh the position and velocity signals
BaseStatusSignal.refreshAll(positionSignal, velocitySignal);
// refresh an array or List of differential signals
BaseStatusSignal[] signals = {diffPositionSignal, diffVelocitySignal};
BaseStatusSignal.refreshAll(signals);
// refresh the supply voltage signal
supplyVoltageSignal.Refresh();
// refresh the position and velocity signals
BaseStatusSignal::RefreshAll(positionSignal, velocitySignal);
// refresh a std::span of differential signals
std::vector<BaseStatusSignal*> signals{&diffPositionSignal, &diffVelocitySignal};
BaseStatusSignal::RefreshAll(signals);
# refresh the supply voltage signal
supply_voltage_signal.refresh()
# refresh the position and velocity signals
BaseStatusSignal.refresh_all(position_signal, velocity_signal)
# refresh a list of differential signals
signals = [diff_position_signal, diff_velocity_signal]
BaseStatusSignal.refresh_all(signals)
Waiting for Signal Updates¶
Instead of using the latest value, the user can instead opt to synchronously wait for a signal update. StatusSignal provides a waitForUpdate(timeoutSec) method that will block the current robot loop until the signal is retrieved or the timeout has been exceeded. This replaces the need to call refresh() on cached StatusSignal objects.
Tip
If you want to zero your sensors, you can use this API to ensure the set operation has completed before continuing program flow.
Tip
The waitForUpdate() method can be method-chained. As a result, you can call waitForUpdate() and getValue() on one line.
// wait up to 1 robot loop iteration (20ms) for fresh data
supplyVoltageSignal.waitForUpdate(0.020);
// wait up to 1 robot loop iteration (20ms) for fresh data
supplyVoltageSignal.WaitForUpdate(20_ms);
# wait up to 1 robot loop iteration (20ms) for fresh data
supply_voltage_signal.wait_for_update(0.020)
Changing Update Frequency¶
All signals can have their update frequency configured via the setUpdateFrequency() method. Additionally, the update frequency of multiple signals can be specified at once using BaseStatusSignal.setUpdateFrequencyForAll() (Java, C++, Python).
Warning
Increasing signal frequency will also increase CAN bus utilization, which can cause indeterminate behavior at high utilization rates (>90%). This is less of a concern when using CANivore, which uses the higher-bandwidth CAN FD bus.
// disable supply voltage reporting (0 Hz)
supplyVoltageSignal.setUpdateFrequency(0);
// speed up position and velocity reporting to 200 Hz
BaseStatusSignal.setUpdateFrequencyForAll(200, positionSignal, velocitySignal);
// speed up array or List of differential signals to 100 Hz
BaseStatusSignal[] signals = {diffPositionSignal, diffVelocitySignal};
BaseStatusSignal.setUpdateFrequencyForAll(100, signals);
// disable supply voltage reporting (0 Hz)
supplyVoltageSignal.SetUpdateFrequency(0_Hz);
// speed up position and velocity reporting to 200 Hz
BaseStatusSignal::SetUpdateFrequencyForAll(200_Hz, positionSignal, velocitySignal);
// speed up std::span of differential signals to 100 Hz
std::vector<BaseStatusSignal*> signals{&diffPositionSignal, &diffVelocitySignal};
BaseStatusSignal::SetUpdateFrequencyForAll(100_Hz, signals);
# disable supply voltage reporting (0 Hz)
supply_voltage_signal.set_update_frequency(0)
# speed up position and velocity reporting to 200 Hz
BaseStatusSignal.set_update_frequency_for_all(200, position_signal, velocity_signal)
# speed up list of differential signals to 100 Hz
signals = [diff_position_signal, diff_velocity_signal]
BaseStatusSignal.set_update_frequency_for_all(100, signals)
When different update frequencies are specified for signals that share a status frame, the highest update frequency of all the relevant signals will be applied to the entire frame. Users can get a signal’s applied update frequency using the getAppliedUpdateFrequency() method.
Signal update frequencies are automatically reapplied by the robot program on device reset.
Optimizing Bus Utilization¶
For users that wish to disable or slow down every unused status signal for their devices to reduce bus utilization, device objects have an optimizeBusUtilization() method (Java, C++, Python). Additionally, multiple devices can be optimized at once using ParentDevice.optimizeBusUtilizationForAll() (Java, C++, Python).
When optimizing the bus utilization for devices, all status signals that have not been given an update frequency using setUpdateFrequency() will be disabled or slowed down. This results in an opt-in model for status signals, maximizing the reduction in bus utilization.
Tip
The update frequency of optimized signals can be specified (Java, C++, Python), where 0 Hz completely disables the signals. The default update frequency is 4 Hz, ensuring that all signals are available when using Signal Logging.
Warning
When using followers, the leader motor must keep the DutyCycle, MotorVoltage, and TorqueCurrent status signals enabled. Additionally, remote sensors must keep related status signals enabled (such as position and velocity).
m_pigeon.optimizeBusUtilization();
ParentDevice.optimizeBusUtilizationForAll(m_leftMotor, m_rightMotor, m_cancoder);
m_pigeon.OptimizeBusUtilization();
hardware::ParentDevice::OptimizeBusUtilizationForAll(m_leftMotor, m_rightMotor, m_cancoder);
self.pigeon.optimize_bus_utilization()
hardware.ParentDevice.optimize_bus_utilization_for_all(self.left_motor, self.right_motor, self.cancoder)
Resetting All to Default¶
The update frequencies of all status signals for a device can be reset to the defaults by calling resetSignalFrequencies() on the device (Java, C++, Python). Additionally, multiple devices can be reset at once using ParentDevice.resetSignalFrequenciesForAll() (Java, C++, Python).
Since devices typically maintain their configured status signal update frequencies until they are power cycled, this can be useful to restore everything to the defaults before reconfiguring update frequencies.
m_pigeon.resetSignalFrequencies();
ParentDevice.resetSignalFrequenciesForAll(m_leftMotor, m_rightMotor, m_cancoder);
m_pigeon.ResetSignalFrequencies();
hardware::ParentDevice::ResetSignalFrequenciesForAll(m_leftMotor, m_rightMotor, m_cancoder);
self.pigeon.reset_signal_frequencies()
hardware.ParentDevice.reset_signal_frequencies_for_all(self.left_motor, self.right_motor, self.cancoder)
Timestamps¶
StatusSignals can have multiple timestamps associated from them, as there are often multiple sources of time. Users can call getTimestamp() (Java, C++, Python) to return the “best” timestamp determined by Phoenix.
getAllTimestamps() can also be used to return all timestamps associated with a given StatusSignal, which returns a collection of Timestamp (Java, C++, Python) objects. The Timestamp objects can be used to perform latency compensation math.
CANivore Timesync¶
Important
CANivore Timesync requires the devices or the CANivore to be Pro licensed.
When using CANivore, the attached CAN devices will automatically synchronize their time bases. This allows devices to sample and publish their signals in a synchronized manner.
Users can synchronously wait for these signals to update using BaseStatusSignal.waitForAll() (Java, C++, Python).
Tip
waitForAll() with a timeout of zero matches the behavior of refreshAll(), performing a non-blocking refresh on all signals passed in.
Because the devices are synchronized, time-critical signals are sampled and published on the same schedule. This combined with the waitForAll() routine means applications can considerably reduce the latency of the timesync signals. This is particularly useful for multi-device mechanisms, such as swerve odometry.
Note
When using a non-zero timeout, the signals passed into waitForAll() should have the same update frequency for synchronous data acquisition. This can be done by calling setUpdateFrequency() or by referring to the API documentation.
The diagram below demonstrates the benefits of using timesync to synchronously acquire signals from multiple devices.
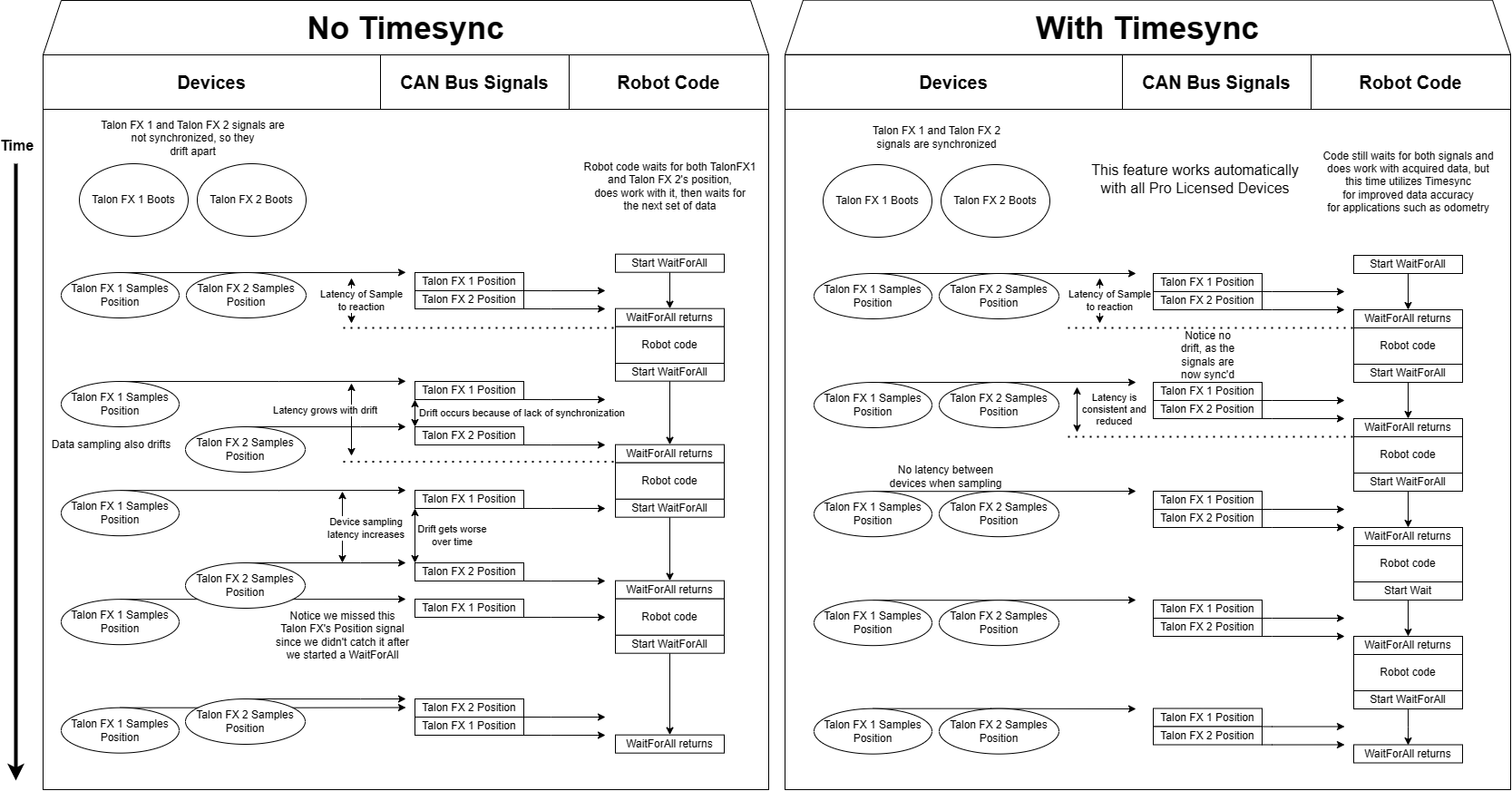
Check the API documentation for information on whether a status signal supports CANivore Timesync.
var talonFXPositionSignal = m_talonFX.getPosition(false);
var cancoderPositionSignal = m_cancoder.getPosition(false);
var pigeon2YawSignal = m_pigeon2.getYaw(false);
BaseStatusSignal.waitForAll(0.020, talonFXPositionSignal, cancoderPositionSignal, pigeon2YawSignal);
// can also send down an array or List of signals
BaseStatusSignal[] signals = {talonFXPositionSignal, cancoderPositionSignal, pigeon2YawSignal};
BaseStatusSignal.waitForAll(0.020, signals);
auto& talonFXPositionSignal = m_talonFX.GetPosition(false);
auto& cancoderPositionSignal = m_cancoder.GetPosition(false);
auto& pigeon2YawSignal = m_pigeon2.GetYaw(false);
BaseStatusSignal::WaitForAll(20_ms, talonFXPositionSignal, cancoderPositionSignal, pigeon2YawSignal);
// can also send down a std::span of signal pointers
std::vector<BaseStatusSignal*> signals{&talonFXPositionSignal, &cancoderPositionSignal, &pigeon2YawSignal};
BaseStatusSignal::WaitForAll(20_ms, signals);
talonfx_position_signal = self.talonfx.get_position(False)
cancoder_position_signal = self.cancoder.get_position(False)
pigeon2_yaw_signal = self.pigeon2.get_yaw(False)
BaseStatusSignal.wait_for_all(0.020, talonfx_position_signal, cancoder_position_signal, pigeon2_yaw_signal)
# can also send down a list of signals
signals = [talonfx_position_signal, cancoder_position_signal, pigeon2_yaw_signal]
BaseStatusSignal.wait_for_all(0.020, signals)
Latency Compensation¶
Users can perform latency compensation using BaseStatusSignal.getLatencyCompensatedValue() (Java, C++, Python).
Important
getLatencyCompensatedValue() does not automatically refresh the signals. As a result, the user must ensure the signal and signalSlope parameters are refreshed before retrieving a compensated value.
double compensatedTurns = BaseStatusSignal.getLatencyCompensatedValue(
m_motor.getPosition(), m_motor.getVelocity()
);
auto compensatedTurns = BaseStatusSignal::GetLatencyCompensatedValue(
m_motor.GetPosition(), m_motor.GetVelocity()
);
compensated_turns = BaseStatusSignal.get_latency_compensated_value(
self.motor.get_position(), self.motor.get_velocity()
)
StatusSignalCollection¶
The StatusSignalCollection (Java, C++, Python) class provides a lightweight wrapper around a list of status signals on a common network. This simplifies the process of refreshing or waiting on multiple status signals.
final StatusSignalCollection signals = new StatusSignalCollection();
// register all the signals we want to refresh (on the same network)
signals.addSignals(
m_talonFX.getPosition(false),
m_cancoder.getPosition(false),
m_pigeon2.getYaw(false)
);
// set all the signals to a 200 Hz update frequency
signals.setUpdateFrequencyForAll(Hertz.of(200));
// now wait on all the signals in the collection
signals.waitForAll(0.010);
StatusSignalCollection signals{};
// register all the signals we want to refresh (on the same network)
signals.AddSignals(
m_talonFX.GetPosition(false),
m_cancoder.GetPosition(false),
m_pigeon2.GetYaw(false)
);
// set all the signals to a 200 Hz update frequency
signals.SetUpdateFrequencyForAll(200_Hz);
// now wait on all the signals in the collection
signals.WaitForAll(10_ms);
self.signals = StatusSignalCollection()
# register all the signals we want to refresh (on the same network)
self.signals.add_signals(
self.talonfx.get_position(False),
self.cancoder.get_position(False),
self.pigeon2.get_yaw(False)
)
# set all the signals to a 200 Hz update frequency
self.signals.set_update_frequency_for_all(200.0)
# now wait on all the signals in the collection
self.signals.wait_for_all(0.010)
SignalMeasurement¶
All StatusSignal objects have a getDataCopy() method that returns a new SignalMeasurement (Java, C++) object. SignalMeasurement is a Passive Data Structure that provides all the information about a signal at the time of the getDataCopy() call, which can be useful for data logging.
Warning
getDataCopy() returns a new SignalMeasurement object every call. Java users should avoid using this API in RAM-constrained applications.