Pigeon 2.0¶
Pigeon 2.0 is the next evolution in the family of Pigeon IMUs.
With no on-boot calibration or temperature calibration required and dramatic improvement to drift, the Pigeon is the easiest IMU to use yet.
Store Page
CAD and purchase instructions.
Hardware User Manual
Wiring and mount instructions in PDF format.
Status Light Reference¶

Important
If the status lights do not exactly match any of the blink codes below, the device may be alternating between multiple blink codes (most commonly between good and bad CAN).
| Blink Codes | |||
|---|---|---|---|
| Animation (Click to play) | LED State | Cause | Possible Fix |
| LEDs Off | No Power | Provide 12V to Red/Black leads. | |
| Blinking Alternating Red | Pigeon 2 does not have valid CAN. | Ensure good connections between CANH and CANL (Yellow and Green) & robot controller is on. | |
| Blinking Alternating Orange | Pigeon 2 detects CAN but does not see Phoenix running on the robot controller. | If Phoenix is running on the robot controller, ensure good connection between the controller and this device. Otherwise, deploy a robot program that uses Phoenix. | |
| Blinking Simultaneous Orange | Pigeon 2 detects CAN and sees the robot is disabled. Phoenix is running in robot controller and Pigeon 2 has good CAN connection to robot controller. | ||
| Blinking Alternating Green | Pigeon 2 detects CAN and sees the robot is enabled. | ||
| Alternate Red/Orange | Damaged Hardware. | Use Tuner X Self Test to confirm the LEDs and that the hardware fault is set, then contact CTRE | |
| Single LED alternates Green/Orange | Pigeon 2 in bootloader. | Field-upgrade device in Tuner X. | |
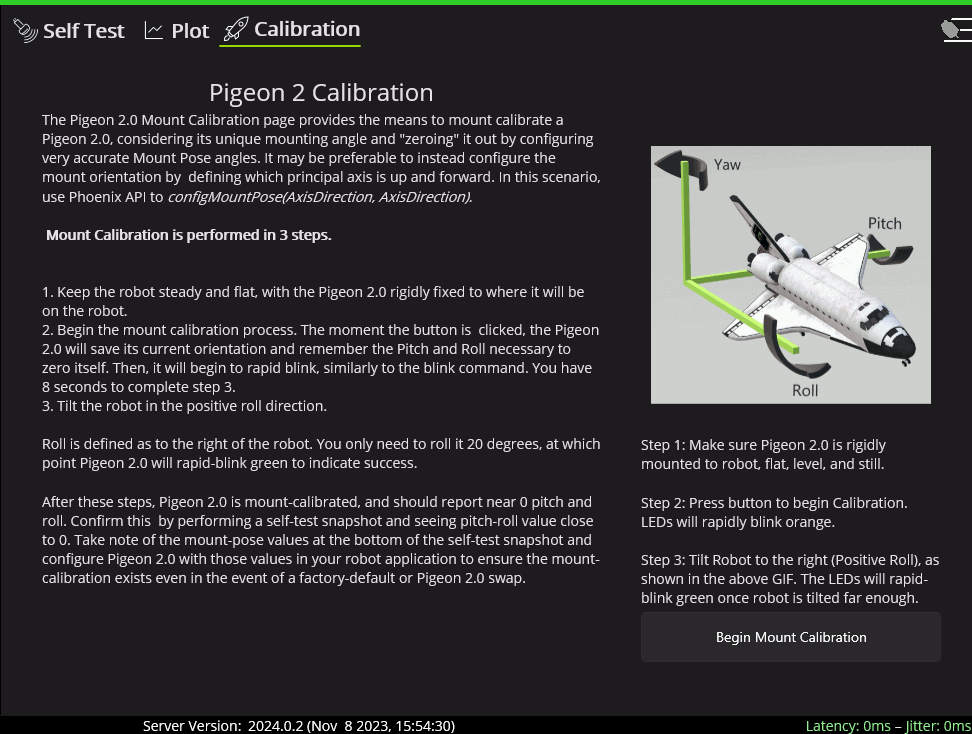
Mount Calibration¶
It’s recommended to perform a mount calibration when placement of the Pigeon 2.0 has been finalized. This can be done via the Calibration page in Tuner X.