Advanced Configuration¶
The CANivore provides additional configuration options for advanced users.
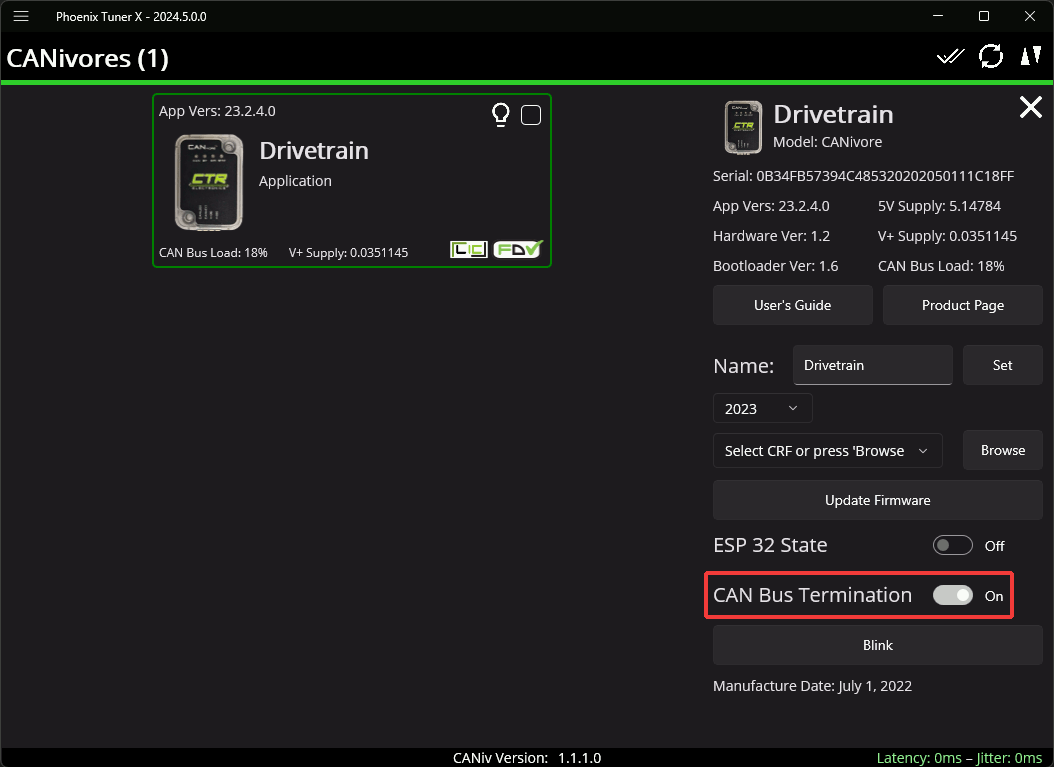
CAN Bus Termination¶
The CANivore has a 120 \(\Omega\) programmable resister for terminating the CAN bus. The resistor can be configured using the CAN Bus Termination toggle in the CANivore device card in Phoenix Tuner X.
Warning
A CAN bus requires two termination resistors, one at each extreme end. If only one is present, communication over CAN may fail.
caniv - CANivore CLI¶
caniv is a Command-line Interface (CLI) to interact with CANivores outside of Phoenix Tuner X.
Note
Unlike the CANivores page in Phoenix Tuner X, caniv does not require a running Phoenix Diagnostic Server.
On Linux systems (including the roboRIO), caniv can be found at /usr/local/bin. On Windows systems, the program is in the Phoenix Tuner X application cache directory, which can be opened by opening the Diagnostic Log page and clicking the left folder icon in the top right:
To view a list of available commands, run caniv either with no parameters or with --help.