Closed-Loop Control#
Phoenix Pro enhances the experience of using onboard closed-loop control through the use of standardized units and a variety of control output types.
Closed Loop Gains#
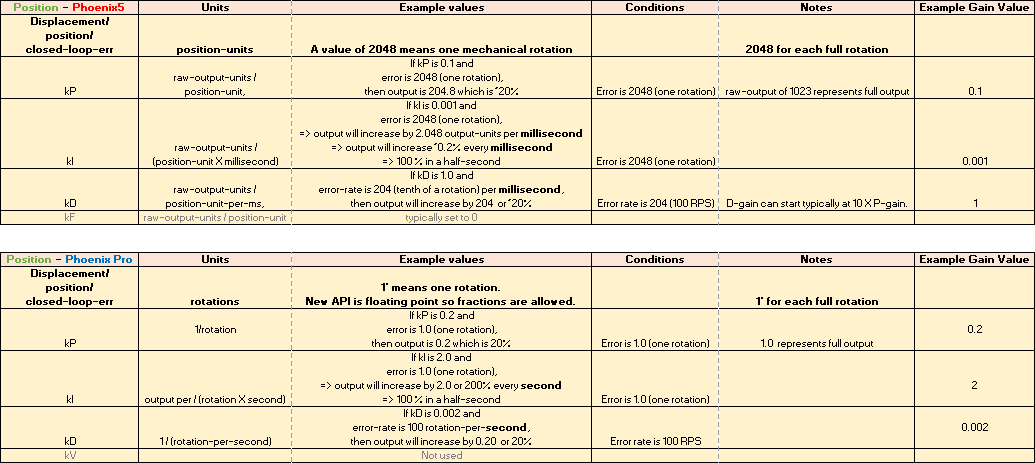
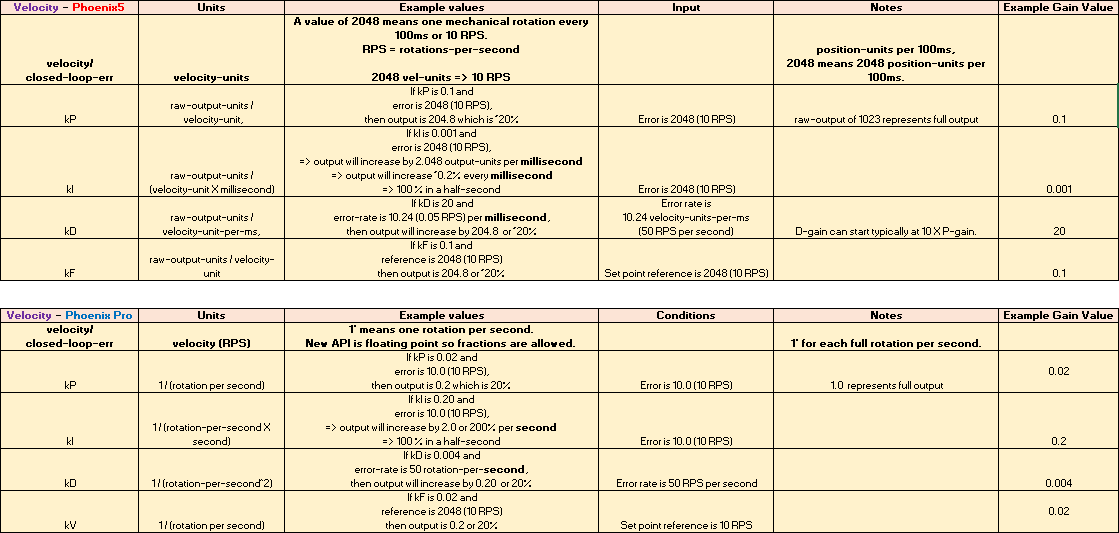
These tables are for translating Phoenix 5 gains to Phoenix Pro DutyCycle gains.
Note
There are other control output types in Phoenix Pro that will change the magnitude of the gains.
Position (DutyCycle)#
Velocity (DutyCycle)#
Using Closed-Loop Control#
v5 |
// robot init, set slot 0 gains
m_motor.config_kF(0, 0.05, 50);
m_motor.config_kP(0, 0.046, 50);
m_motor.config_kI(0, 0.0002, 50);
m_motor.config_kD(0, 4.2, 50);
// enable voltage compensation
m_motor.configVoltageComSaturation(12);
m_motor.enableVoltageCompensation(true);
// periodic, run velocity control with slot 0 configs,
// target velocity of 50 rps (10240 ticks/100ms)
m_motor.selectProfileSlot(0, 0);
m_motor.set(ControlMode.Velocity, 10240);
// robot init, set slot 0 gains
m_motor.Config_kF(0, 0.05, 50);
m_motor.Config_kP(0, 0.046, 50);
m_motor.Config_kI(0, 0.0002, 50);
m_motor.Config_kD(0, 4.2, 50);
// enable voltage compensation
m_motor.ConfigVoltageComSaturation(12);
m_motor.EnableVoltageCompensation(true);
// periodic, run velocity control with slot 0 configs,
// target velocity of 50 rps (10240 ticks/100ms)
m_motor.SelectProfileSlot(0, 0);
m_motor.Set(ControlMode::Velocity, 10240);
|
Pro |
// class member variable
VelocityVoltage m_velocity = new VelocityVoltage(0);
// robot init, set slot 0 gains
var slot0Configs = new Slot0Configs();
slot0Configs.kV = 0.12;
slot0Configs.kP = 0.11;
slot0Configs.kI = 0.5;
slot0Configs.kD = 0.01;
m_talonFX.getConfigurator().apply(slot0Configs, 0.050);
// periodic, run velocity control with slot 0 configs,
// target velocity of 50 rps
m_velocity.Slot = 0;
m_motor.setControl(m_velocity.withVelocity(50));
// class member variable
controls::VelocityVoltage m_velocity{0_tps};
// robot init, set slot 0 gains
configs::Slot0Configs slot0Configs{};
slot0Configs.kV = 0.12;
slot0Configs.kP = 0.11;
slot0Configs.kI = 0.5;
slot0Configs.kD = 0.01;
m_talonFX.GetConfigurator().Apply(slot0Configs, 50_ms);
// periodic, run velocity control with slot 0 configs,
// target velocity of 50 rps
m_velocity.Slot = 0;
m_motor.SetControl(m_velocity.WithVelocity(50_tps));
|
Motion Magic®#
v5 |
// robot init, set slot 0 gains
m_motor.config_kF(0, 0.05, 50);
// PID runs on position
m_motor.config_kP(0, 0.2, 50);
m_motor.config_kI(0, 0, 50);
m_motor.config_kD(0, 4.2, 50);
// set Motion Magic settings
m_motor.configMotionCruiseVelocity(16384); // 80 rps = 16384 ticks/100ms cruise velocity
m_motor.configMotionAcceleration(32768); // 160 rps/s = 32768 ticks/100ms/s acceleration
m_motor.configMotionSCurveStrength(3); // s-curve smoothing strength of 3
// enable voltage compensation
m_motor.configVoltageComSaturation(12);
m_motor.enableVoltageCompensation(true);
// periodic, run Motion Magic with slot 0 configs
m_motor.selectProfileSlot(0, 0);
// target position of 200 rotations (409600 ticks)
// add 0.02 (2%) arbitrary feedforward to overcome friction
m_motor.set(ControlMode.MotionMagic, 409600, DemandType.ArbitraryFeedforward, 0.02);
// robot init, set slot 0 gains
m_motor.Config_kF(0, 0.05, 50);
// PID runs on position
m_motor.Config_kP(0, 0.2, 50);
m_motor.Config_kI(0, 0, 50);
m_motor.Config_kD(0, 4.2, 50);
// set Motion Magic settings
m_motor.ConfigMotionCruiseVelocity(16384); // 80 rps = 16384 ticks/100ms cruise velocity
m_motor.ConfigMotionAcceleration(32768); // 160 rps/s = 32768 ticks/100ms/s acceleration
m_motor.ConfigMotionSCurveStrength(3); // s-curve smoothing strength of 3
// enable voltage compensation
m_motor.ConfigVoltageComSaturation(12);
m_motor.EnableVoltageCompensation(true);
// periodic, run Motion Magic with slot 0 configs
m_motor.SelectProfileSlot(0, 0);
// target position of 200 rotations (409600 ticks)
// add 0.02 (2%) arbitrary feedforward to overcome friction
m_motor.Set(ControlMode::MotionMagic, 409600, DemandType::ArbitraryFeedforward, 0.02);
|
Pro |
Note The Motion Magic® S-Curve Strength has been replaced with jerk control in Phoenix Pro. // class member variable
MotionMagicVoltage m_motmag = new MotionMagicVoltage(0);
// robot init
var talonFXConfigs = new TalonFXConfiguration();
// set slot 0 gains
var slot0Configs = talonFXConfigs.Slot0Configs;
slot0Configs.kS = 0.24; // add 0.24 V to overcome friction
slot0Configs.kV = 0.12; // apply 12 V for a target velocity of 100 rps
// PID runs on position
slot0Configs.kP = 4.8;
slot0Configs.kI = 0;
slot0Configs.kD = 0.1;
// set Motion Magic settings
var motionMagicConfigs = talonFXConfigs.MotionMagicConfigs;
motionMagicConfigs.MotionMagicCruiseVelocity = 80; // 80 rps cruise velocity
motionMagicConfigs.MotionMagicAcceleration = 160; // 160 rps/s acceleration (0.5 seconds)
motionMagicConfigs.MotionMagicJerk = 1600; // 1600 rps/s^2 jerk (0.1 seconds)
m_talonFX.getConfigurator().apply(talonFXConfigs, 0.050);
// periodic, run Motion Magic with slot 0 configs,
// target position of 200 rotations
m_motmag.Slot = 0;
m_motor.setControl(m_motmag.withPosition(200));
// class member variable
controls::MotionMagicVoltage m_motmag{0_tr};
// robot init
configs::TalonFXConfiguration talonFXConfigs{};
// set slot 0 gains
auto& slot0Configs = talonFXConfigs.Slot0Configs;
slot0Configs.kS = 0.24; // add 0.24 V to overcome friction
slot0Configs.kV = 0.12; // apply 12 V for a target velocity of 100 rps
// PID runs on position
slot0Configs.kP = 4.8;
slot0Configs.kI = 0;
slot0Configs.kD = 0.1;
// set Motion Magic settings
auto& motionMagicConfigs = talonFXConfigs.MotionMagicConfigs;
motionMagicConfigs.MotionMagicCruiseVelocity = 80; // 80 rps cruise velocity
motionMagicConfigs.MotionMagicAcceleration = 160; // 160 rps/s acceleration (0.5 seconds)
motionMagicConfigs.MotionMagicJerk = 1600; // 1600 rps/s^2 jerk (0.1 seconds)
m_talonFX.GetConfigurator().Apply(talonFXConfigs, 50_ms);
// periodic, run Motion Magic with slot 0 configs,
// target position of 200 rotations
m_motmag.Slot = 0;
m_motor.SetControl(m_motmag.WithPosition(200_tr));
|
Motion Profiling#
The Motion Profile Executor is not supported in the current release of Phoenix Pro. Users can use Motion Magic® or run a motion profile on the robot controller.