Closed-Loop Control#
Closed-loop control typically refers to control of a motor that relies on sensor data to adjust based on error. Systems/mechanisms that rely on maintaining a certain position or velocity achieve this state using closed-loop control. This is achieved by feedback (PID) and feedforward control. Closed-loop control can be performed on the robot controller or on the individual motor controllers. The benefit of onboard closed-loop control is that there is no sensor latency and 1 kHz update frequency. This can result in a more responsive output compared to running the closed-loop on the robot controller.
Since closed-loop control changes based on the dynamics of the system (velocity, mass, CoG, etc.), closed-loop relies on PID and feedforward parameters. These parameters are configured either via Tuner Configs or in code. The parameters can be determined using System Identification (such as with WPILib SysID) or through manual tuning.
Manual tuning typically follows this process:
Set \(K_p\), \(K_i\) and \(K_d\) to zero.
Increase \(K_p\) until the output starts to oscillate around the setpoint.
Increase \(K_d\) as much as possible without introducing jittering to the response.
All closed-loop control requests follow the naming pattern {ClosedLoopMode}{ControlOutputType}. For example, the VelocityVoltage control request performs a velocity closed-loop using voltage output.
Gain Slots#
It may be useful to switch between presets of gains in a motor controller, so the TalonFX supports multiple gain slots. All closed-loop control requests have a member variable Slot that can be assigned an integer ID to select the set of gains used by the closed-loop. The gain slots can be configured in code using Slot*Configs (Java, C++) objects.
Velocity Control#
A Velocity closed loop can be used to maintain a target velocity (in rotations per second). This can be useful for controlling flywheels, where a velocity needs to be maintained for accurate shooting.
Velocity closed loop is currently supported for all base control output types. The units of the output is determined by the control output type.
In a Velocity closed loop, the gains should be configured as follows:
\(K_s\) - output to overcome static friction (output)
\(K_v\) - output per unit of requested velocity (output/rps)
\(K_p\) - output per unit of error in velocity (output/rps)
\(K_i\) - output per unit of integrated error in velocity (output/rotation)
\(K_d\) - output per unit of error derivative in velocity (output/(rps/s))
// in init function, set slot 0 gains
var slot0Configs = new Slot0Configs();
slot0Configs.kS = 0.05; // Add 0.05 V output to overcome static friction
slot0Configs.kV = 0.12; // A velocity target of 1 rps results in 0.12 V output
slot0Configs.kP = 0.11; // An error of 1 rps results in 0.11 V output
slot0Configs.kI = 0.5; // An error of 1 rps increases output by 0.5 V each second
slot0Configs.kD = 0.01; // An acceleration of 1 rps/s results in 0.01 V output
m_talonFX.getConfigurator().apply(slot0Configs);
// in init function, set slot 0 gains
configs::Slot0Configs slot0Configs{};
slot0Configs.kS = 0.05; // Add 0.05 V output to overcome static friction
slot0Configs.kV = 0.12; // A velocity target of 1 rps results in 0.12 V output
slot0Configs.kP = 0.11; // An error of 1 rps results in 0.11 V output
slot0Configs.kI = 0.5; // An error of 1 rps increases output by 0.5 V each second
slot0Configs.kD = 0.01; // An acceleration of 1 rps/s results in 0.01 V output
m_talonFX.GetConfigurator().Apply(slot0Configs);
Once the gains are configured, the Velocity closed loop control request can be sent to the TalonFX. The control request object has an optional feedforward term that can be used to add an arbitrary value to the output, which can be useful to account for the effects of gravity.
// create a velocity closed-loop request, voltage output, slot 0 configs
var request = new VelocityVoltage(0).withSlot(0);
// set velocity to 8 rps, add 0.5 V to overcome gravity
m_talonFX.setControl(request.withVelocity(8).withFeedForward(0.5));
// create a velocity closed-loop request, voltage output, slot 0 configs
auto request = controls::VelocityVoltage{0_tps}.WithSlot(0);
// set velocity to 8 rps, add 0.5 V to overcome gravity
m_talonFX.SetControl(request.WithVelocity(8_tps).WithFeedForward(0.5_V));
Converting from Meters#
In some applications, it may be useful to translate between meters and rotations. This can be done using the following equation:
where meters is the target in meters, wheelDiameter is the diameter of the wheel in meters, and gearRatio is the gear ratio between the output shaft and the wheel.
This equation also works with converting velocity from m/s to rps.
Position Control#
A Position closed loop can be used to target a specified motor position (in rotations).
Position closed loop is currently supported for all base control output types. The units of the output is determined by the control output type.
In a Position closed loop, the gains should be configured as follows:
\(K_s\) - unused, as there is no target velocity
\(K_v\) - unused, as there is no target velocity
\(K_p\) - output per unit of error in position (output/rotation)
\(K_i\) - output per unit of integrated error in position (output/(rotation*s))
\(K_d\) - output per unit of error derivative in position (output/rps)
// in init function, set slot 0 gains
var slot0Configs = new Slot0Configs();
slot0Configs.kP = 24; // An error of 0.5 rotations results in 12 V output
slot0Configs.kI = 0; // no output for integrated error
slot0Configs.kD = 0.1; // A velocity of 1 rps results in 0.1 V output
m_talonFX.getConfigurator().apply(slot0Configs);
// in init function, set slot 0 gains
configs::Slot0Configs slot0Configs{};
slot0Configs.kP = 24; // An error of 0.5 rotations results in 12 V output
slot0Configs.kI = 0; // no output for integrated error
slot0Configs.kD = 0.1; // A velocity of 1 rps results in 0.1 V output
m_talonFX.GetConfigurator().Apply(slot0Configs);
Once the gains are configured, the Position closed loop control request can be sent to the TalonFX. The control request object has an optional feedforward term that can be used to add an arbitrary value to the output, which can be useful to account for the effects of gravity or friction.
// create a position closed-loop request, voltage output, slot 0 configs
var request = new PositionVoltage(0).withSlot(0);
// set position to 10 rotations
m_talonFX.setControl(request.withPosition(10));
// create a position closed-loop request, voltage output, slot 0 configs
auto request = controls::PositionVoltage{0_tr}.WithSlot(0);
// set position to 10 rotations
m_talonFX.SetControl(request.WithPosition(10_tr));
Motion Magic®#
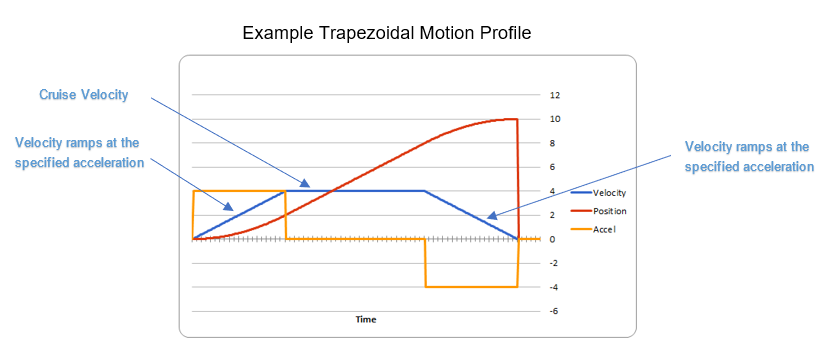
Motion Magic® is a control mode that provides the benefit of Motion Profiling without needing to generate motion profile trajectory points. When using Motion Magic®, the motor will move to a target position using a motion profile, while honoring the user specified acceleration, maximum velocity (cruise velocity), and optional jerk.
The benefits of this control mode over “simple” PID position closed-looping are:
Control of the mechanism throughout the entire motion (as opposed to racing to the end target position)
Control of the mechanism’s inertia to ensure smooth transitions between set points
Improved repeatability despite changes in battery load
Improved repeatability despite changes in motor load
After gain/settings are determined, the robot controller only needs to periodically set the target position.
There is no general requirement to “wait for the profile to finish”. However, the robot application can poll the sensor position and determine when the motion is finished if need be.
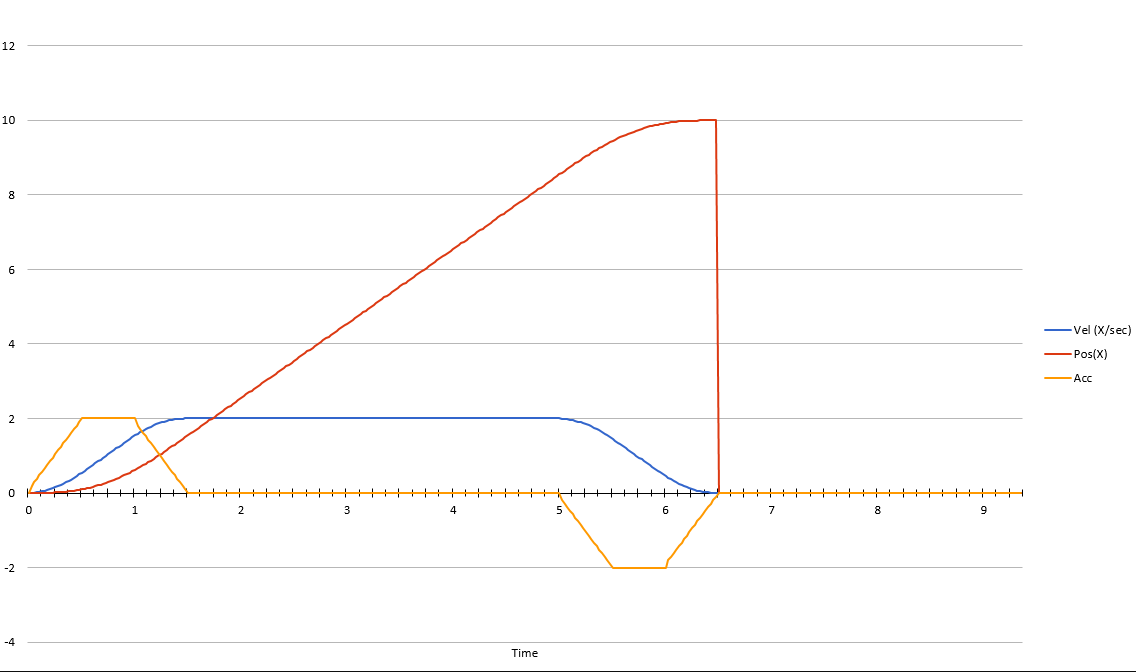
Motion Magic® functions by generating a trapezoidal/S-Curve velocity profile that does not exceed the specified cruise velocity, acceleration, or jerk. This is done automatically by the motor controller.
Note
If the remaining sensor distance to travel is small, the velocity may not reach cruise velocity as this would overshoot the target position. This is often referred to as a “triangle profile”.
If the Motion Magic® jerk is set to a nonzero value, the generated velocity profile is no longer trapezoidal, but instead is a continuous S-Curve (corner points are smoothed).
An S-Curve profile has the following advantaged over a trapezoidal profile:
Reducing oscillation of the mechanism.
Maneuver is more deliberate and reproducible.
Note
The jerk control feature, by its nature, will increase the amount of time a movement requires. This can be compensated for by increasing the configured acceleration value.
The following parameters must be set when controlling using Motion Magic®
Cruise Velocity - peak/cruising velocity of the motion
Acceleration - controls acceleration and deceleration rates during the beginning and end of motion
Jerk - controls jerk, which is the derivative of acceleration
Using Motion Magic® in API#
Motion Magic® is currently supported for all base control output types. The units of the output is determined by the control output type.
The Motion Magic® jerk, acceleration, and cruise velocity can be configured in code using a MotionMagicConfigs (Java, C++) object.
In Motion Magic®, the gains should be configured as follows:
\(K_s\) - output to overcome static friction (output)
\(K_v\) - output per unit of target velocity (output/rps)
\(K_p\) - output per unit of error in position (output/rotation)
\(K_i\) - output per unit of integrated error in position (output/(rotation*s))
\(K_d\) - output per unit of error in velocity (output/rps)
// in init function
var talonFXConfigs = new TalonFXConfiguration();
// set slot 0 gains
var slot0Configs = talonFXConfigs.Slot0Configs;
slot0Configs.kS = 0.25; // Add 0.25 V output to overcome static friction
slot0Configs.kV = 0.12; // A velocity target of 1 rps results in 0.12 V output
slot0Configs.kP = 4.8; // A position error of 2.5 rotations results in 12 V output
slot0Configs.kI = 0; // no output for integrated error
slot0Configs.kD = 0.1; // A velocity error of 1 rps results in 0.1 V output
// set Motion Magic settings
var motionMagicConfigs = talonFXConfigs.MotionMagicConfigs;
motionMagicConfigs.MotionMagicCruiseVelocity = 80; // Target cruise velocity of 80 rps
motionMagicConfigs.MotionMagicAcceleration = 160; // Target acceleration of 160 rps/s (0.5 seconds)
motionMagicConfigs.MotionMagicJerk = 1600; // Target jerk of 1600 rps/s/s (0.1 seconds)
m_talonFX.getConfigurator().apply(talonFXConfigs);
// in init function
configs::TalonFXConfiguration talonFXConfigs{};
// set slot 0 gains
auto& slot0Configs = talonFXConfigs.Slot0Configs;
slot0Configs.kS = 0.25; // Add 0.25 V output to overcome static friction
slot0Configs.kV = 0.12; // A velocity target of 1 rps results in 0.12 V output
slot0Configs.kP = 4.8; // A position error of 2.5 rotations results in 12 V output
slot0Configs.kI = 0; // no output for integrated error
slot0Configs.kD = 0.1; // A velocity error of 1 rps results in 0.1 V output
// set Motion Magic settings
auto& motionMagicConfigs = talonFXConfigs.MotionMagicConfigs;
motionMagicConfigs.MotionMagicCruiseVelocity = 80; // Target cruise velocity of 80 rps
motionMagicConfigs.MotionMagicAcceleration = 160; // Target acceleration of 160 rps/s (0.5 seconds)
motionMagicConfigs.MotionMagicJerk = 1600; // Target jerk of 1600 rps/s/s (0.1 seconds)
m_talonFX.GetConfigurator().Apply(talonFXConfigs);
Tip
Motion Magic® supports modifying jerk and acceleration on the fly (requires firmware version 23.6.10.1 or newer).
Once the gains are configured, the Motion Magic® request can be sent to the TalonFX. The control request object has an optional feedforward term that can be used to add an arbitrary value to the output, which can be useful to account for the effects of gravity.
// create a Motion Magic request, voltage output, slot 0 configs
var request = new MotionMagicVoltage(0).withSlot(0);
// set position to 10 rotations
m_talonFX.setControl(request.withPosition(10));
// create a Motion Magic request, voltage output, slot 0 configs
auto request = controls::MotionMagicVoltage{0_tr}.WithSlot(0);
// set position to 10 rotations
m_talonFX.SetControl(request.WithPosition(10_tr));